

The idea of getting into a car, stating your destination, and relaxing while it navigates through traffic sounds like something straight out of an ’80s sci-fi movie.
Yet, autonomous vehicles (AVs) are already a reality, currently undergoing advanced real-world testing and commercial deployment.
But how exactly does a complex machine of metal and circuits make driving decisions faster than a human being?
The answer lies in a powerful combination of sensory hardware and the frontier of artificial intelligence: Agentic AI (frequently referred to as agentive AI by industry specialists, and popularly known as Autonomous AI).
To understand the impact of this technology, we need to analyze how these systems evolved from being merely reactive to taking complete control of the steering wheel.
The Brain Behind the Machine: The AI Decision Loop
For a vehicle to be considered truly agentic, it must perform three simultaneous, uninterrupted, and independent tasks to achieve its goal: getting you from Point A to Point B safely.
This continuous framework is known as the Decision Lifecycle:
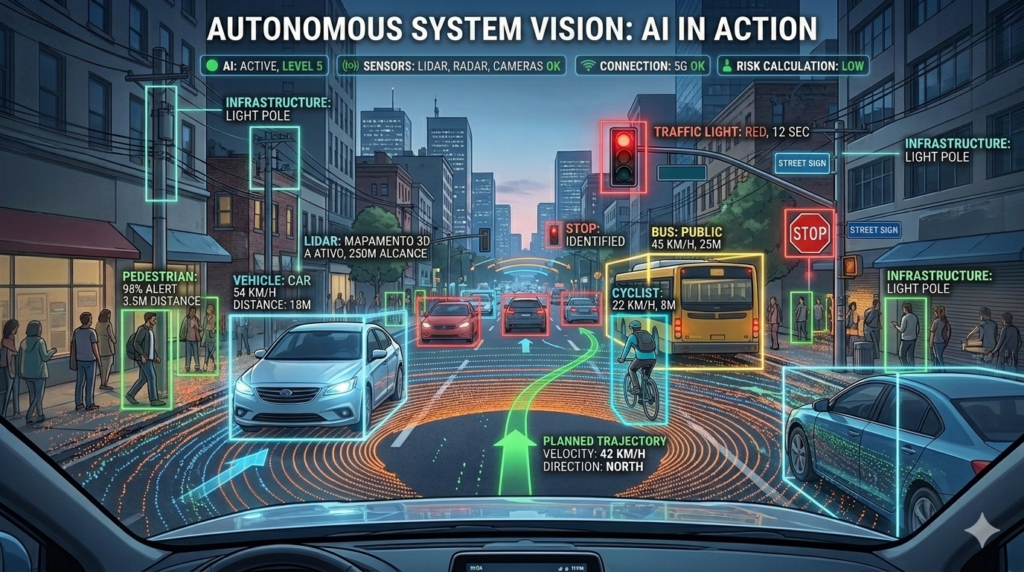
1. Perception: The Electronic “Eyes”
Unlike human drivers, who rely almost exclusively on visual sight, an autonomous vehicle utilizes sensor fusion to construct a persistent, real-time 3D map of its surroundings:
- LiDAR (Light Detection and Ranging): Fires millions of laser pulses per second that bounce off objects and return to the sensor, measuring distances with millimeter precision.
- Radar: Excellent at tracking the velocity of surrounding vehicles, operating reliably in heavy rain, fog, or snow where standard optical sensors struggle.
- Computer Vision (Cameras): Crucial for reading traffic signs, identifying traffic light colors, and recognizing crosswalks. The AI processes these video feeds and “learns” to distinguish a dog from a child, or a stray trash bag from a hazardous rock.
2. Planning: Real-Time Decision Making
Once the 3D environmental map is established, Machine Learning takes over.
Unlike a “passive” AI model (such as a text translator that only acts when prompted), a self-driving car operates on a continuous loop.
It processes millions of variables every second, constantly calculating questions like: “Is that cyclist about to merge into my lane?” or “The asphalt is wet; should I increase my braking distance?”
The system assumes end-to-end responsibility for executing the trip.
3. Control: Mechanical Execution
Finally, the AI’s intent is transmitted to the vehicle’s drive-by-wire electronic systems, translating algorithms into precise physical commands for the throttle, brakes, and steering.
Because this is a form of Embodied AI, its digital decisions carry immediate physical consequences in the real world.
Fortunately, unlike a human driver, an AI doesn’t get distracted by a smartphone, never suffers from fatigue, and possesses near-instantaneous reaction times.
The Shift from Reactive AI to Proactive AI
The definitive turning point for modern autonomous vehicles is transitioning from simple reaction to pure proactivity—the core hallmark of Agentic AI.
This means anticipating road dynamics before they physically manifest.
- Intent Prediction: The vehicle doesn’t just register a pedestrian standing on the curb (reactive behavior); it leverages probabilistic models to predict whether that pedestrian intends to step into the street (proactive behavior).
- Defensive Driving: If the system detects a vehicle in the adjacent lane driving erratically, it proactively decides to increase its following distance or change lanes long before an imminent collision risk occurs.
- Route Optimization: The system proactively reroutes the vehicle upon detecting upcoming gridlock or a traffic incident, ensuring trip efficiency without requiring the passenger to initiate a navigation change.
| AI Type in Traffic | Real-World Driving Behavior |
| Reactive AI | Slams on the brakes suddenly when it detects a stationary obstacle directly ahead. |
| Proactive (Agentic) AI | Smoothly eases off the throttle hundreds of feet prior, noticing that traffic density is thickening or that a green light is about to turn red. |
However, an important distinction must be made: the Agentic AI inside an autonomous car still retains its reactive reflexes.
In fact, it absolutely has to.
You still expect an autonomous vehicle to initiate an emergency brake if a pedestrian suddenly darts right in front of it out of nowhere.
The reality is that Reactive AI hasn’t been abandoned; rather, it has acquired new capabilities— Proactive Autonomy.
It expanded the baseline by building layers on top of it.
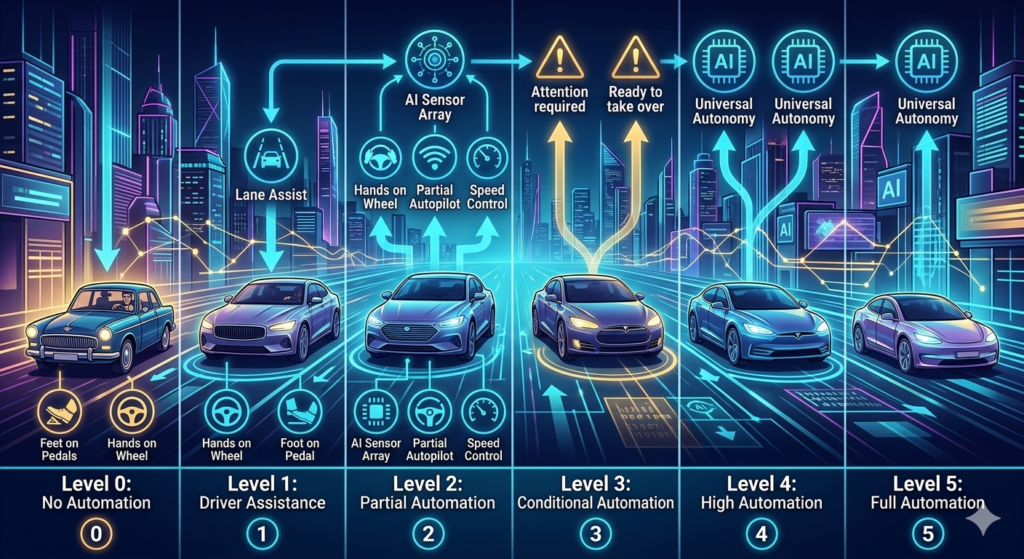
The 6 Levels of Autonomy: Where Do We Stand?
Not every self-driving car operates with the same degree of agency.
The Society of Automotive Engineers (SAE) defines six distinct levels of automation to classify this technological evolution:
- Level 0 (No Automation): The human driver handles 100% of the dynamic driving task manually.
- Level 1 (Driver Assistance): The vehicle assists with a single, isolated function (e.g., Adaptive Cruise Control).
- Level 2 (Partial Automation): The vehicle controls both steering and acceleration/deceleration simultaneously, but the human driver must remain fully engaged and keep their hands on the wheel (e.g., Tesla Autopilot).
- Level 3 (Conditional Automation): The vehicle can drive itself under ideal environmental conditions but expects the human operator to take over immediately if the system requests intervention.
- Level 4 (High Automation): The car drives entirely on its own within designated, geofenced areas. It can operate without steering wheels or pedals in these specific environments.
- Level 5 (Full Automation): The vehicle can drive anywhere, on any roadway, under any weather condition, requiring zero human intervention whatsoever.
Currently, most luxury commercial vehicles available to consumers sit firmly at Level 2. Meanwhile, robotaxi companies like Waymo and Cruise are already operating commercial, driverless Level 4 fleets in select US cities.
Core Challenges Blocking Mass Adoption
Despite rapid architectural leaps toward Level 5 autonomy, three primary roadblocks continue to slow down the widespread global scaling of these vehicles on public roads:
- Algorithmic Ethics: In the unavoidable event of an imminent, critical accident, how should the AI prioritize safety? Should it protect its own passengers at all costs, or minimize harm to surrounding pedestrians? These deep ethical dilemmas are being heavily debated by tech ethicists, legal scholars, and programmers worldwide.
- Edge AI (On-Device Processing): An autonomous vehicle generates terabytes of data per hour. It cannot rely on a cloud connection to decide whether to hit the brakes in a split-second emergency. The data processing must be completely local, robust, and instantaneous—demanding ultra-powerful AI chips mounted directly inside the vehicle chassis.
- Rigorous Preventative Maintenance: Because the system depends heavily on a pristine reading of the external environment, any hardware or sensor degradation can be catastrophic. Autonomous fleets require frequent, rigorous sensor calibration and mechanical inspections; otherwise, they risk algorithmic “blindness.”
What Does the Future Hold?
Autonomous vehicles are the most practical everyday example of Autonomous AI we have right now, stepping into a brand-new category that the tech market has dubbed Agentic AI.
Moving from reactive AI to proactive, agentic systems is the ultimate turning point for urban mobility.
The mass adoption of this technology promises to eliminate up to 90% of traffic accidents, the vast majority of which are currently caused by human error, intoxication, or distraction.
Beyond a noticeable surge in traffic safety, total automation has the potential to fundamentally reshape our urban ecosystems.
Imagine cities with far fewer parking lots and vastly more green spaces. Since cars could operate continuously as part of a shared, on-demand fleet, they could simply drop off their passengers and autonomously park themselves in remote, low-density lots.
The steering wheel, which served as the ultimate symbol of human control for over a century, is gradually becoming an optional feature.
We are entering an era where the act of driving is being traded for the intelligence of automated navigation.
Nevertheless, there will always be a segment of the population that prefers to stay behind the wheel. After all, for many people, driving is more than a chore—it’s a genuine hobby. That goes for this author, too.
Would you trust an AI to drive you around? Let us know your thoughts in the comments below!